



Next: Applicazione su dati Montecarlo
Up: Ricostruzione di tracce e
Previous: La qualità del Fit
Contents
Come già spiegato nel paragrafo 2.1 il processo di
ricostruzione di un evento generato da un fotone gamma nel tracciatore
di AGILE è articolato in tre fasi, la ricerca delle tracce, il fit di queste
e
la loro combinazione per la determinazione della direzione del fotone.
Sfruttando la tecnica del Kalman filter è possibile sia ricercare le tracce
lasciate dal passaggio della coppia  sia effettuarne il fit.
sia effettuarne il fit.
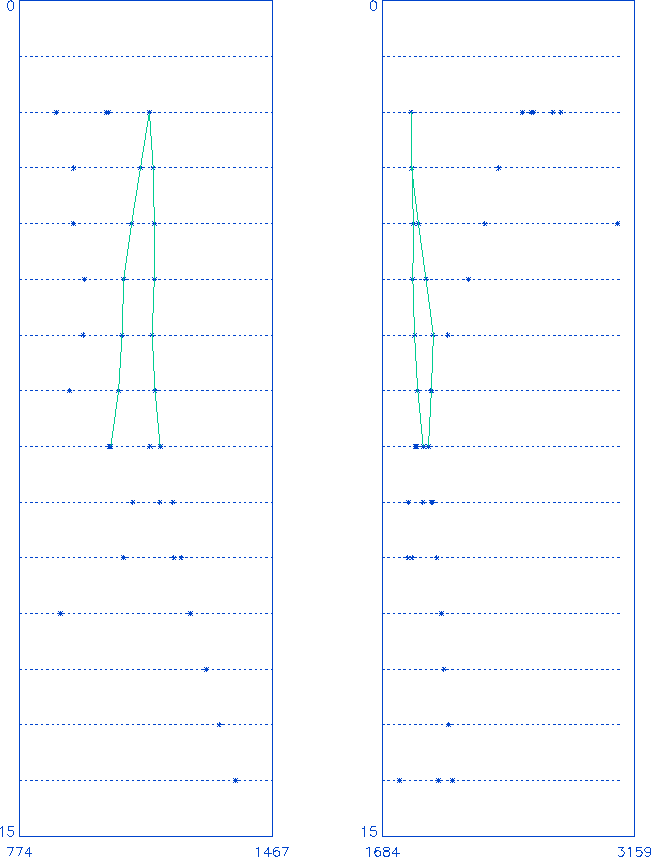
Figure 2.5:
La proiezione X e la proiezione Y dello stesso evento di fig. 2.2.
Le tracce lasciate
dalla coppia sono state
trovate con il metodo basato sul Kalman filter
 |
La ricerca delle tracce può essere fatta in modo del tutto
naturale con il Kalman filter attraverso i processi di prediction e
filtering usati in modo iterativo. Se infatti su di un piano si ha una
stima delle coordinate (posizione e inclinazione) di una traccia, è
possibile calcolare il suo prolungamento sul piano successivo
(prediction) e, per ogni misura presente, stimare la probabilità
che essa appartenga alla traccia, basandosi sul chi quadro del
residuo relativo.
Non esiste un unico modo per utilizzare queste informazioni,
inoltre è necessario trovare un criterio secondo il quale inizializzare le
tracce sul primo piano.
La tecnica adottata consiste nella scelta di tutte le possibili
combinazioni iniziali tra le misure sul
primo piano e quelle sul secondo piano. Si avranno quindi n x m
(con n e m numero di hits sul primo e secondo piano)
tracce alle quali vengono aggiunte (dal terzo piano in poi) le
misure sottostanti scegliendo su ogni piano quella con maggiore
probabilità di essere parte della traccia. Ogni volta che una
misura viene aggiunta, attraverso il processo di filtering, la
traccia viene corretta sulla base dell'informazione aggiunta.
Per ognuna delle tracce provate viene portato a termine il
processo di fit (già iniziato con il filtering) attraverso le
operazioni di smoothing.
Infine per ognuno dei n x m fit viene calcolato il chi quadro
totale, e basandosi su questi vengono scelte le due tracce o,
eventualmente, la traccia più probabile.
Next: Applicazione su dati Montecarlo
Up: Ricostruzione di tracce e
Previous: La qualità del Fit
Contents
Andrea Giuliani
2003-10-14